電子部品の調達の仕方
僕はよく部品の調達には次の二つのサイトを使います。
秋月電子通商 トップページ - 電子部品・半導体 【通販・販売】
電子部品・半導体パーツの通販 販売 | マルツオンライン (marutsu.co.jp)
マルツパーツは若干高いので、基本秋月で買って、ばら売りがされていない抵抗や配送料500円が高いと思ったときはマルツの店舗に行って買うみたいなやり方をしていました。
そして、部品を見る時はデータシートを確認しましょう。データシートとは、部品のスペックが書かれたファイルで、この制限を超えて使うと部品が壊れるという値を示す絶対最大定格と、使用したときの挙動を示す電気的特性が書かれています。
ICの場合は回路を組み方を示すアプリケーション例もついていることが多く、回路設計で考えることが大幅に減ります。
試しに、NJM2396F05という電源ICを見てみましょう。
低損失レギュレータ5V1.5A NJM2396F05: 半導体 秋月電子通商-電子部品・ネット通販 (akizukidenshi.com)
このページに「NJM2396 PDFデータシート」というリンクがあるので、中身を見てみます。下にスクロールしていくと2ページ目に「絶対最大定格」と「電気的特性」という項目があるのが分かりますね。

このICは入力された電圧を5Vに変換して出力する3端子定電圧レギュレータという部類のICなのですが、絶対最大定格から「35Vまでは入力しても壊れず5Vに変換できる」「1.5Aまでは出力可能」、電気的特性(入出力間電位差)から「入力が少なくとも5.5V以上ないと5Vを安定して出力できない」ということが分かります。
またさらにスクロールすると、アプリケーション例がついているので、この通りに回路を組めばいいことが分かります。

本を使った(Arduinoを使わない)電子工作の始め方!
どうも、どんぐりです。
僕は小5でプログラミング(Java)を学び、独学で電子工作を始めました。
作ったものはラジオやアンプ、電源装置、ICレコーダーといったものから、電気ショックタイマーや水中ドローンといった変わったものまで作っています。
しかし、そのような変わったものを作るためには、ArduinoやRaspberry Pi(ちっさいコンピュータみたいなやつ)に頼らず、自分で回路の設計もできないと難しいです。(ちなみにプログラミングも僕はPICという小型のICをお勧めしています。)
今回は本を使ったそのような電子工作の学び方を紹介しましょう!
ちなみに、ネットだけで学びたい場合は次の記事を見てみてください。
本を使った小学生でもできる電子工作の始め方
僕が実際に学んだ時に、必要だったなと思う本は次の4つです。読んでほしい順に書いています。
- 『電子ブロックmini』でいろんな回路を作る
- 『誰でも手軽にできる電子工作入門』で実際の電子工作のイメージをつかむ
- 『10日でおぼえるJava入門教室 第2版』でプログラミングを学ぶ
- 『図解でわかるはじめての電気回路』でアナログ回路の理論を学ぶ
それぞれの本を詳しく解説していきましょう。
1.『大人の科学マガジンシリーズ:電子ブロックmini』でいろんな回路を作る
この本は電子ブロックという、一つ一つの電子部品がブロック状になっていて、それらをパズルのように組み替えることでいろいろな回路を組める付録がついています。
人によってはもしかしたら「えーそんなおもちゃみたいなやつじゃなくてさっさと自分で電気ショックタイマーとか作ってしまいたい!」と思うかもしれませんが、50種類もの回路を、書いてある通りに組むだけで実際に作って学べるというのがこのブロックのいいところだと思っています。
実際に作るのはただ理論を学ぶよりも何倍も学びになりますが、自分で作ろうとすると一つ作るのにも回路設計とかはんだ付けとかしないといけません。
また、回路の大部分は各機能を作る回路のテンプレートの組み合わせでできていますが、そのテンプレートを一気に50パターンも学べてしまうのはとてもいいことだと思います。(もちろん、自分で思いついた回路を試すことでもより深い理解につながるでしょう(変な回路作ると壊れるのでそれは自己責任でお願いします))。
さらに、本には各部品や各回路の説明が書かれています。
難しい数式による説明はなく、言葉による説明なので、より詳しい説明が欲しい場合は他の本に譲ることになりますが、この本によって各部品のイメージをつかむことができます。(逆にこの本で詳しい理解はしようとしなくて大丈夫です。)
楽しく、そして実際に作って学べるということで、入門書としてとてもおすすめです。
※ちなみに、この本を読む小学生は「\(AB\)」は「\(A\times B\)」という意味だということを知っておいてほしいです。中学生で習いますが、掛け算(\(\times\))の記号は省略して書くことができます。
2.『誰でも手軽にできる電子工作入門』で実際の電子工作のイメージをつかむ
この本を読むと、回路だけでなく、設計の手順や部品の調達の仕方、基板の作り方、ケースの加工の仕方等、実際の電子工作の仕方が分かるようになります。
電子ブロックの本には載っていなかった回路以外の実際の電子工作の世界が分かって楽しいです。
ただ、僕も実際に読んで思ったことですが、若干レベルが高いです。レベルが高いというのは難しい数式が出てくるとかではないのですが、ノイズの少ない基盤の作り方など、何度か電子工作をやったことがある人向けのノウハウなどが書かれていたりします。
また、20年も前の本なので、これよりも良書はある気がしますし、ArduinoやRaspberry Piなど、今どきの部品は出てきません。
まあ、古い本で中古も多いはずですから、中古で安く買って仮に買わなくてよかったってなっても被害が少ないようにしておけばいいと思います(責任逃れ)。
ただ、一つ言えるのは、実際の電子工作の仕方が分かる役割を持つ本を一冊もっておいて方がいいということです。僕が紹介する他の本はこの役割を持っていないので、新しいものでも古いものでもいいのでこのような本を持っておくと良いと思います。
ちなみにこの本で覚える際は、分からなくてもいいからとりあえず一旦全部読んでおいて、実際に作る時に参照する、みたいにすればいいと思います。
また、(電子ブロックにはなかったけど)FETやオペアンプってものがあるんだ、基盤はこうやって作るんだ、ケースはこうやって加工するんだ、あとは、PICというマイクロコンピュータがあるんだ、ってことが分かればいいんじゃないかなと思います。
3.『10日でおぼえるJava入門教室 第2版』でプログラミングを学ぶ
この本は古い本ですでに第3版が出ていますが、強く第2版を読むことをお勧めします。
理由は、知人が第3版を買ったのですが、第3版は難しくなっていると聞いたからです。
第2版なら僕が小5の時に理解できた本ですし、またこの本はすでにできたコードを手打ちしてコピーし、実際に動かしてみて動作を確認するという電子ブロックに似た感じの仕組みになっていて覚えやすいです。
プログラミングは挫折する人がとても多いですので、本選びは慎重になってください。
また、Javaという言語は実は電子工作では使わないのですが、JavaはC、C++、python、Javascript等の他の言語ととても似ており、Javaを学び、少しだけ他の構文を覚えるだけで5つほどの言語を読めるようになります。
そして、分かりやすさが保証された本がありますので、この本で覚えることをお勧めします。
ちなみに、この本を読むときのコツは、
- 実際にコード(プログラム)を打つ場面では、日本語を打つ時以外は必ず半角モードにする癖をつける(スペース、アルファベット、記号は全部半角で打つ)
- 分からないことがあっても、むしろそれを知ろうと思って10日目まで進む
です。1.に関しては日本語以外を全角で打つとコンパイルエラーが起きます。
また、2.に関しては途中で電子工作では使わないウィンドウアプリケーションを作り始めますが、それを作ることでそれまで習った文法の理解が深まるので、ぜひ最後までやってほしいと思います。
4.『図解でわかるはじめての電気回路』でアナログ回路の理論を学ぶ
確かこの本は中学生の知識があれば分かると書かれていた気がします。
実際僕はいくつかの電気回路の本を買いましたが、理論の勉強にはこの本があれば十分だったと思いました。
この本でもいくつかの回路の説明が欠けていますが、このサイトで補えればと思います。
小学生でもできる(Arduinoを使わない)電子工作の始め方!
どうも、どんぐりです。
僕は小5でプログラミング(Java)を学び、独学で電子工作を始めました。
作ったものはラジオやアンプ、電源装置、ICレコーダーといったものから、電気ショックタイマーや水中ドローンといった変わったものまで作っています。
しかし、そのような変わったものを作るためには、ArduinoやRaspberry Pi(ちっさいコンピュータみたいなやつ)に頼らず、自分で回路の設計もできないと難しいです。(ちなみにプログラミングも僕はPICという小型のICをお勧めしています。)
今回は、小学生でもできるそのような電子工作のやり方を説明しましょう!
小学生でもできる(Arduinoを使わない)電子工作のやり方
電子工作は、1.アイデア出し→2.回路設計(とプログラミング)→3.基板作り→4.ケース加工→完成というステップがあります。それぞれのステップを詳しく説明しましょう。
1.アイデア出し
作りたいものを考えます。電気ショックタイマーを作りたい、とか、水中ドローンを作りたい、とかです。
具体例
電気ショックタイマーを作りたい。イメージはこんな感じ。

①液晶表示器(LCD):残り時間の表示。
②ケース:売られているケースは直方体型が多く、加工もしやすいので直方体型にする。
③押しボタン:スタート/ストップ(残り時間の設定モード時はカウントアップ)、セット(残り時間の設定)。
④腕時計の腕に巻き付ける部分:100均の腕時計を分解してつける。先端は切るのではなく描いてないだけ。
⑤電気ショック用の端子:このタイマーを腕時計のようにつければ、端子が腕に密着する。
2.回路設計(とプログラミング)
回路は多くの場合次のような構成になります。

センサー回路:外界からの情報をコンピュータが扱いやすい形にして伝える部分。マイクや赤外線センサー、ボタンやスイッチ等と、その制御回路。
コンピュータ回路:センサー回路からの情報を処理し、アクチュエータ回路に伝える。初心者はここにPIC(後述)を使うのがおすすめ。コンピュータ回路という名付けているがただのアナログ回路でもよい。
アクチュエータ回路:コンピュータ回路からの情報を外界に伝える部分。LEDや液晶表示器、モーターやスピーカー等と、その制御回路。
そして、それぞれの部分にはテンプレートがあり、それらを組み合わせることに作ることができることがほとんどです。
テンプレートについては別の記事で紹介します。
また、部品の調達の仕方は次の記事で紹介しています。
部品には機能を持つ回路を集積したICやモジュール(例:電源IC、ラジオIC、距離測定モジュール、無線モジュール…)という部品もあるので、そのような部品の存在を知っておけば回路設計はとても楽になります。
また、部品にはデータシートと言って、部品のスペックが書かれたファイルがあります(秋月電子やマルツオンライン)が、ICやモジュールは回路例がついていることが多く、回路設計で考えることを大幅に減らすことができます。
ちなみに、PICとはプログラムを書き込めるICのこと(小さいコンピュータみたいなもの)です(ArduinoやRaspberry Piと違って電源部分やインターフェイス部分がない分、小型で安価)。
具体例
電気ショックタイマーは次のような構成にしました。

電源部:小型化のためにボタン電池を用いました。データシートによれば液晶表示器が3Vで動くとのことだったので、3Vのボタン電池を使い、特に電源回路は挟まないことにしました。![]()
![]() の記号はそれぞれ全てつなげるという意味で、ここを通して他の部分に電源からの電流が流れています。特に
の記号はそれぞれ全てつなげるという意味で、ここを通して他の部分に電源からの電流が流れています。特に![]() はGND(グラウンド)といい、回路で0Vと数えるところです。(ちなみに、電流を流すには+と-の電圧が必要ですが、基本-の電圧はGNDで共通とします。例えば、PICの7,6,5,4番ピンから(に)液晶表示器に(から)電流が流れていますが、その電流は液晶表示器のGND(PICのVSS端子)から出てくるようになっています。)
はGND(グラウンド)といい、回路で0Vと数えるところです。(ちなみに、電流を流すには+と-の電圧が必要ですが、基本-の電圧はGNDで共通とします。例えば、PICの7,6,5,4番ピンから(に)液晶表示器に(から)電流が流れていますが、その電流は液晶表示器のGND(PICのVSS端子)から出てくるようになっています。)
アクチュエータ部:液晶表示器は秋月電子で「液晶表示器」と検索し、最も小型で安価なものを選びました。電気ショック回路のところが空欄になっていますが、電撃蚊取りラケットというものを分解して基板をそのまま使うことにしました。ただし、そのままだと痛すぎるので(というか人体に使うのは推奨されていないのでやる場合は自己責任でお願いします)、回路(参考サイト)を見てみて、強度の調整に関係ありそうなベース抵抗(トランジスタのベース電流が流れる抵抗)に半固定抵抗(回路図でRという素子)を挟んで調整してみると見事弱めることができました。(実験は自己責任でお願いします。)
コンピュータ部:データシートによればPICは1.8V~5.5Vで動くので、VDD(3V)をそのまま電源として使います。液晶表示器がSPI通信(SDI(SDO)、SCK、/CSという3本の信号線を使う)という通信でデータのやり取りを行うため、小型化のため8ピンタイプのPICの中で、SPI通信に対応していて最も安価なPIC12F1822を用いることにしました。なお、データシートによれば 液晶表示器はSPI通信用以外にRSという信号線が必要で、PICのピン数が少ないので、電源を入れた時しか使わないSPI通信用の/CSという信号線を電気ショックのON/OFF用の信号線として兼ねることにしました(結果電源を入れた直後一瞬だけ電気ショックが流れてしまいますが、それはご愛敬ということで)。(なお、8ピンの次に多いピン数のPICは14ピンで、急に大きくなってしまうため8ピンとしました。)
センサー部:PICの端子が2つしか余らなかったので、センサー部の押しボタンの数は2つにしました(本当は3つスイッチがあった方が操作性は良い)。ちなみに、センサー部にVDDが接続されていないように見えますが、PICのプルアップ抵抗という機能をONにすることで、PIC内部でVDDに接続されています。
※ここでは電気ショックタイマーの作り方の説明が目的ではないので、細かいことは割愛します。ちなみに、PICのデータシートはとても親切で、SPI通信がどのような通信であるかということも説明してくれます。英語が苦手な場合は日本語データシートもあります。
プログラミングについて
PICの場合はC言語かPIC用のアセンブリ言語を用いてプログラミングを行います。
アセンブリ言語は、文法がとても簡単なうえに、データシートにプログラミング例がたくさんあるため、他の言語を覚えた人にとってはとても覚えやすいと思います。
しかし、完全な初学者がアセンブリ言語が理解できるかは分からないので、一旦アセンブリ言語に触れてみて意味の分からない抽象概念がたくさん出てきたら、分かりやすい本でC言語系(Javaもその一つ)を学ぶと良いでしょう。ちなみにこのとき、文法さえ分かっていればいいので、PIC用のC言語の本である必要はないと思います。
3.基板作り
僕が良く使う基板にはユニバーサル基板と感光基板の2種類があります。
ユニバーサル基板はすでに部品の端子を通す穴が開いており、スズメッキ線とはんだ付けを行うことで、部品同士をつなげます。簡単に作れますが、ノイズが多かったり、自分の思うような配置は難しいのが特徴です。
感光基板は自分の思うような配線(パターンという)の銅板を特殊な方法で描き、穴あけをして作ります。市販されている電子機器と同じプリント基板の一種です。パターン設計をしたり特殊な薬品を使わないといけませんが、ノイズに強い回路や両面基板も作れます。
詳しくは別の記事で紹介します。
具体例
この時は時間がなかったので(夏休みの自由研究として提出した)ユニバーサル基板を使いました。なお、電気ショック部の基板はそのまま使い、半固定抵抗やユニバーサル基板との接続は配線で行いました。液晶表示器やボタン等もケースに取り付けるため、配線で基板とつなぎました。
4.ケース加工
ただいま製作中です。
【第6回/全10回】インピーダンス
インピーダンスは前回のフェーザ法から導かれる「拡張されたオームの法則」上の概念です。これによって抵抗だけでなくコイルやコンデンサもオームの法則上で扱うことができるようになります。
なお、フェーザ法から導かれる概念なので、引き続き直流成分と初期条件の影響は無視し、十分に時間が経って安定した時の交流電流と交流電圧の関係についてのみ成り立ちます。
フェーザ法からの導出
フェーザ法で考えれば(フェーザ法の特性上\(v=V_m\cos(ωt+θ)\)と\(i=I_m\cos(ωt+φ)\)の関係のみを考えている)、
\[\begin{cases}
v=Ri\\
v=L\frac{di}{dt}\\
v=\frac{1}{C}\int i dt
\end{cases}\]
より、
\[\begin{cases}
\dot{V}=R\dot{I}\\
\dot{V}=jωL\dot{I}\\
\dot{V}=\frac{1}{jωC}\dot{I}
\end{cases}\tag{1}\]
です(\(\dot{V}=V_me^{j(ωt+θ)}\)、\(\dot{I}=I_me^{j(ωt+φ)}\))。これは
\[\dot{V}=複素定数\dot{Z}\times\dot{I}\]
の形をしていて、抵抗部分が複素数\(\dot{Z}\)になっただけで完全にオームの法則と言えるのではないでしょうか。その証拠に、電流の式は
\[\begin{cases}
i=\frac{v}{R}\\
i=\frac{1}{L}\int v dt\\
i=C\frac{dv}{dt}
\end{cases}\]
なのですが、これをフェーザ法に通すと、
\[\begin{cases}
\dot{I}=\frac{\dot{V}}{R}\\
\dot{I}=\frac{1}{jωL}\dot{V}\\
\dot{I}=jωC\dot{V}
\end{cases}\]
となり、これを変形すれば式(1)に一致し、それぞれの電圧と電流の関係が拡張されたオームの法則上でも保存されているのが分かります。
インピーダンスとは
抵抗の概念を複素数に拡張したもので、
\[\dot{V}=複素定数\dot{Z}\times\dot{I}\]
の複素定数\(\dot{Z}\)の部分です。
抵抗\(R\)のインピーダンスはそのまま\(R\)、コイル\(L\)のインピーダンスは\(jωL\)、コンデンサ\(C\)のインピーダンスは\(\displaystyle\frac{1}{jωC}\)になります。
また、両辺の絶対値、偏角を取ることで、
\[V_m=|\dot{Z}|I_m\]
\[(ωt+θ)=\arg\dot{Z}+(ωt+φ)\]
と、電圧と電流の振幅の関係と位相の関係はインピーダンス\(\dot{Z}\)の絶対値と偏角を使って求められることが分かります。

※図では分かりやすいように絶対値を1にしている
ちなみに、\(\dot{V}\)や\(\dot{I}\)の実数部分(緑や水色の矢印)は実際に流れる電圧や電流を表します。
\[\mathrm{Re}(\dot{V})=V_m\cos(ωt+θ)\]
\[\mathrm{Re}(\dot{I})=I_m\cos(ωt+φ)\]
さらに、インピーダンスの凄いところは、オームの法則と同じなので、直列抵抗や並列抵抗の計算式や、その他いろいろな法則がそのまま使えるところです。
【第5回/全10回】フェーザ法
前回複素数を学びましたが、今回はいよいよ複素数を使って交流回路を四則演算(\(+,-,\times,\div\))で解く方法である、フェーザ法について説明します。
しかし、フェーザ法は電子工作では基本的に使わず、実際に使うのはフェーザ法から導かれた次回の「インピーダンス」になります。次回の記事が理解しやすくなるかもしれないので説明しますが、難しい場合はこの記事を飛ばしても大丈夫です。
また、フェーザ法では直流成分と初期条件の影響は無視し、十分に時間が経って安定した時の交流電流と交流電圧の関係を導きます。
フェーザ法のアイデア
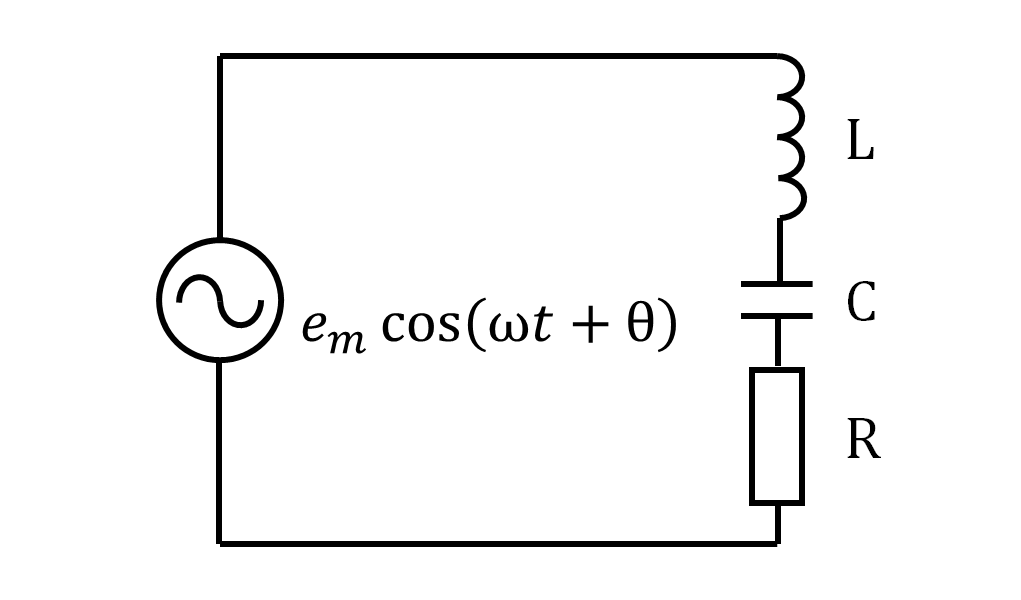
例えば、下図のような回路では、次のような回路方程式が立てられます。
\[L\frac{di}{dt}+\frac{1}{C}\int i dt+Ri=E_m\cos (ωt+θ)\tag{0}\]
コンデンサの積分についてですが、フェーザ法では直流成分(定数部分)や初期条件を無視するため、不定積分、かつ積分定数\(\mathrm{C}=0\)として考えます。
1.\(e^{jx}\)への置き換え
ここで、とりあえず意味は分からなくていいので、\(\cos(ωt+θ)\)を\(e^{j(ωt+θ)}\)に置き換えてみます。すると、
\[L\frac{di}{dt}+\frac{1}{C}\int i dt+Ri=e^{j(ωt+θ)}=(E_me^{jθ})e^{jωt}\tag{1}\]
ここで、右辺が(定数)\(\times e^{jωt}\)であることから、この方程式を満たす電流の関数\(\dot{I}(t)\)(微分方程式の解といいます)が、\(\dot{I}(t)=\dot{A}e^{jωt}\)の形になると予想してみます(駄目だったらまた予想を変えてやってみます。これを未定係数法といいます)。\(\dot{I}(t)=\dot{A}e^{jωt}\)を代入して、
\[L\frac{d(\dot{A}e^{jωt})}{dt}+\frac{1}{C}\int(\dot{A}e^{jωt})dt+R(\dot{A}e^{jωt})=(E_me^{jθ})e^{jωt}\]
\[jωL\dot{A}e^{jωt}+\frac{1}{jωC}\dot{A}e^{jωt} dt+R\dot{A}e^{jωt}=(E_me^{jθ})e^{jωt}\tag{2}\]
\[\dot{A}=\frac{E_me^{jθ}}{jωL+\frac{1}{jωC}+R}\]
\[I(t)=\displaystyle\frac{E_me^{jθ}}{jωL+\frac{1}{jωC}+R}e^{jωt}=\displaystyle\frac{E_me^{j(ωt+θ)}}{jωL+\frac{1}{jωC}+R}\]
これによって、とりあえず\(\cos(ωt+θ)\)を\(e^{j(ωt+θ)}\)に置き換えた式(1)の解\(\dot{I}(t)\)が求まりました。
2.\(e^{jx}\)の意味
さて、ここで\(e^{j(ωt+θ)}\)が何かを考えてみましょう。\(e^x\)のマクロリーン展開(関数を多項式で表す方法です。聞いたことないかな…)は
\[e^x=1+x+ \frac{1}{2!}x^2+\frac{1}{3!}x^3+\frac{1}{4!}x^4+\cdots+\frac{1}{n!}x^n+\cdots\]
です(これの証明は高校でも習いません。こういうものがあるんだなと思ってください)。これで\(x=jx\)とすると、\(j^2=-1\)ですから、
\[\begin{align}
e^{jx} =&1-\frac{1}{2!}x^2+\frac{1}{4!}x^4+\cdots+(-1)^n\frac{1}{(2n)!}x^{2n}+\cdots\\+j\{&x-\frac{1}{3!}x^3+\frac{1}{5!}x^5 +\cdots+(-1)^n\frac{1}{(2n+1)!}x^{2n+1}+\cdots\}\end{align}\]
そして実は\(\cos x\)、\(\sin x\)のマクロリーン展開は
\[\begin{align}\cos{x}&= 1 - \frac{1}{2!}x^2 +\frac{1}{4!}x^4+\cdots+ (-1)^{n}\frac{1}{(2n)!}x^{2n} + \cdots\\\sin{x}&= x - \frac{1}{3!}x^3 +\frac{1}{5!}x^5+\cdots+ (-1)^n\frac{1}{(2n+1)!}x^{2n+1} + \cdots\end{align}\]
であるので、最終的に
\[e^{jx} =\cos x+j\sin x\]
となります(オイラーの公式)。今回の場合、\(e^{j(ωt+θ)} =\cos (ωt+θ)+j\sin (ωt+θ)\)
より、\(\dot{I}(t)\)は
\[L\frac{di}{dt}+\frac{1}{C}\int i dt+Ri=E_m\{\cos (ωt+θ)+j\sin (ωt+θ)\}\tag{1'}\]
の解だったことが分かります。
3.(0)式の両辺の実数部分を取り出して解とする
一旦、実数関数\(i_{Re}\)、\(i_{Im}\)を用いて
\[\dot{I}=i_{Re}+ji_{Im}\]
と実数と虚数に分けて代入すると、
\[L\frac{d(i_{Re}+ji_{Im})}{dt}+\frac{1}{C}\int (i_{Re}+ji_{Im}) dt+R(i_{Re}+ji_{Im})\\=E_m\{\cos (ωt+θ)+j\sin (ωt+θ)\}\]
\[\begin{align}L\frac{di_{Re}}{dt}+\frac{1}{C}\int i_{Re}dt+Ri_{Re}+&j(L\frac{di_{Im}}{dt}+\frac{1}{C}\int i_{Im}dt+Ri_{Im})\\=E_m\cos (ωt+θ)+&jE_m\sin (ωt+θ)\end{align}\]
実数部分と虚数部分は独立しているので(複素数をベクトルのように表した図を思い出す)、両辺の実数部分だけを取ることができ、
\[L\frac{di_{Re}}{dt}+\frac{1}{C}\int i_{Re}dt+Ri_{Re}=E_m\cos (ωt+θ)\]
よって式(0)の解は
\[I(t)=i_{Re}(t)=\mathrm{Re}\left(\displaystyle\frac{E_me^{j(ωt+θ)}}{jωL+\frac{1}{jωC}+R}\right)\]
※\(\mathrm{Re}(\dot{Z})\)は\(\dot{Z}\)の実数部分(Real Part)だけ取る演算子。
となることが分かります。これで問題は解けました。
今回の例ではRLC直列回路を考えましたが、もっと複雑な回路で、キルヒホッフの法則を使うなどして、扱う電流と電圧を一つずつにしたときに
\[\begin{align}(&L_1\displaystyle\frac{di(t)}{dt},\cdots,L_p\displaystyle\frac{di(t)}{dt},\\&\displaystyle\frac{1}{C_1}\int i(t) dt,\cdots,\displaystyle\frac{1}{C_q}\int i(t) dt,\\&R_1i(t),\cdots,R_ri(t))\text{の加減}\text{乗除の塊})=E_m\cos(ωt+θ)\tag{0}\end{align}\]
となっていたとしても、書き換えを行うことで
\[\begin{align}(&jωL_1\dot{I}(t),\cdots,jωL_p\dot{I}(t),\\&\displaystyle\frac{1}{jωC_1}\dot{I}(t),\cdots,\displaystyle\frac{1}{jωC_q}\dot{I}(t),\\&R_1\dot{I}(t),\cdots,R_r\dot{I}(t))\text{の加減}\text{乗除の塊})=E_me^{j(ωt+θ)}\tag{1}\end{align}\]
となり、四則演算で解くことができるようになるのです(証明はしないが実際に計算してみると左辺が(複素定数)\(\times\dot{I}(t)\)という形になるため。このあとは\(\dot{I}(t)=\)の形にして実数部分を取り出せばよい)。
フェーザ法とは
※難しければ覚えなくていいです。
フェーザ法では
\[E_m\cos(ωt+θ)→E_me^{jθ}\]
\[I_m\cos(ωt+φ)→I_me^{jφ}\]
\[\frac{d}{dt}→jω\]
\[\int dt→\frac{1}{jω}\]
と置き換えを行って、四則演算で解き、不明な部分を求めることで解を導きます。分からないものが電流であるならば、分からないけどとりあえず\(i(t)→(I_m\cos(ωt+φ)→)I_me^{jφ}\)と置き換えを行って、\(I_m\)と\(φ\)を求めて\(I_m\cos(ωt+φ)\)の形に戻せばいいです。
「フェーザ法のアイデア」の(2)式の両辺を\(e^{jωt}\)で割ったものをヒントにすればこの置き換えが成り立つことが分かるのではないでしょうか。
しかし、最終的な解の求め方は「フェーザ法のアイデア」で説明したものと違います。「フェーザ法のアイデア」では答えに至る一歩手前で\(\dot{A}\)を求めていましたが、実は\(\dot{A}\)が、\(|\dot{A}|=I_m\)、\(\arg\dot{A}=φ\)を満たす\(\dot{A}=I_me^{jφ}\)となります(理由は省略させていただきます)。なので、その時点で絶対値と偏角を求めて、\(i_me^{jφ}→I_m\cos(ωt+φ)\)と元に戻すことで解が求められます。
以上は逆に電流が分かっていて電圧が分からない状況でも代わりに\(V_m\)と\(θ\)を求めること以外は同じです。
【第4回/全10回】複素数
コイルやコンデンサのある回路は、微分や積分を使わなければならず、とても計算が大変です。しかし、交流電圧と交流電流の関係に限れば、複素数を使うことで四則演算(\(+,-,\times,\div\))のみで計算を行うことができるようになります。
具体的な方法は次回以降2回に分けて学びますが、その準備として今回は複素数について学びましょう。
※すでに知っている人は飛ばしていいです。
複素数とは
虚数\(i=\sqrt{-1}\)は二乗すると\(-1\)になる数と定義されます。
実際にはそんな数字はありませんが、仮想的に\(i\)が存在するとするわけです。
さて、実数\(a\)に\(-1\)をかけると符号が反転して\(-a\)になります。向きが\(180^\circ(\pi)\)変わるわけです。
では、実数\(a\)に\(i\)をかけるとどうなるでしょう。
2回かけると、\(-1\)をかけたことになって向きが\(180^\circ(\pi)\)変わるわけですから、1回あたり向きが\(90^\circ(\displaystyle\frac{\pi}{2})\)変わっていると言えるのではないでしょうか。

こう考えると、実数と虚数を組み合わせて、ベクトルのように位置を示すことができるようになります。

\[z=a+bi\]
※\(a,b\)は実数
このように実数と(純)虚数を足したものを、複素数といいます。
また、\(|z|\)は複素数の絶対値(大きさ)を表し、\(\arg z\)は偏角を表します。なお、偏角は実軸から図の矢印の向き(反時計周り)に測ります。
\[|z|=\sqrt{a^2+b^2}\]
\[\arg z=\tan^{-1}\frac{b}{a}\]
※\(\tan^{-1}x\)(アークタンジェントエックス)は逆三角関数の一種。直角三角形の直角を挟む2辺の長さから角度を求める。これは人間が計算するものではなく関数電卓等を使って求める。
複素数の性質
複素数\(z_1\)、\(z_2\)の積\(Z=z_1z_2\)は絶対値が\(z_1\)、\(z_2\)の絶対値の積、偏角が\(z_1\)、\(z_2\)の偏角の和になります。
\[|Z|=|z_1z_2|=|z_1||z_2|\]
\[\arg Z=\arg (z_1z_2)=\arg z_1+\arg z_2\]
また、複素数\(z_1\)を\(z_2(\neq0)\)で割ってできた複素数\(Z=\displaystyle\frac{z_1}{z_2}\)は絶対値が\(z_1\)の絶対値を\(z_2\)の絶対値で割ったもの、偏角が\(z_1\)、\(z_2\)の偏角の差になります。
\[|Z|=\left|\frac{z_1}{z_2}\right|=\frac{|z_1|}{|z_2|}\]
\[\arg Z=\arg \frac{z_1}{z_2}=\arg z_1-\arg z_2\]
図による証明
積についてのみ証明します。
※厳密な証明ではありません。イメージをつかんでもらえればと思います。
- \(z_1=a+bi\)と\(z_2=c+di\)の積\(Z\)を、\(Z=z_1z_2=cz_1+diz_1\)と分けて図に書きます。
①まず、\(z_1\)(水色の直角三角形)を\(c\)倍した図形を書きます(黄緑色の直角三角形)。
②次に、その点を始点として\(z_1\)(水色の直角三角形)を\(d\)倍して、\(\displaystyle\frac{\pi}{2}(90^\circ)\)回転させた図形(オレンジの直角三角形)を書きます。
③すると、②の終点(赤色の点)は\(Z=z_1z_2\)となります。 - この時、赤色の直角三角形の直角を挟む二辺は、\(z_1\)の斜辺(\(|z_1|\))をそれぞれ\(c\)倍、\(d\)倍したものです。よって、赤色の直角三角形で三平方の定理を立てて
\[|Z|=\sqrt{(c|z_1|)^2+(d|z_1|)^2}=|z_1|\sqrt{c^2+d^2}=|z_1||z_2|\]
また、二辺が\(c:d\)の比率になっているため、赤色の直角三角形は\(z_2(=c+di)\)と相似になります。すると、この図形の原点を頂点とする角の大きさ(緑色の矢印)が\(\arg z_2\)と等しいということが言えます。
よって図より、
\[\arg Z=\arg z_1+\arg z_2\]

交流回路での複素数の使用法
電子工作の世界では、複素数は\(\dot{Z}\)のように上に点をつけ、電流\(i\)と混同しないように虚数単位には\(j=\sqrt{-1}\)を用います。今後、特に書いていなければ虚数単位は\(j\)を用います。
交流電流\(i=I_m\sin(ωt+θ)\)が流れている回路を考えます。
この電流がコイルに流れる時、両端子に現れる電圧\(v_L\)は
\[v_L=L\frac{di}{dt}=ωLI_m\cos(ωt+θ)=ωLI_m\sin(ωt+θ+\frac{\pi}{2})\]
と表せます。これは、\(v_L\)の振幅は\(i\)より\(ωL\)倍で、位相が\(\displaystyle\frac{\pi}{2}(90^\circ)\)進むと言えます。
また、この電流がコンデンサに流れる時、 両端子に現れる電圧\(v_C\)は
\[v_C=\frac{1}{C}\int_0^t i dt'=-\frac{1}{ωC}I_m\cos(ωt+θ)+\frac{Q_0}{C}+\frac{1}{ωC}I_m\cos θ\\=\frac{1}{ωC}I_m\sin(ωt+θ-\frac{\pi}{2})+\frac{Q_0}{C}+\frac{1}{ωC}I_m\cos θ\]
と表せます。これは、\(v_C\)の交流分の振幅は\(i\)より\(\displaystyle\frac{1}{ωC}\)倍で、位相が\(\displaystyle\frac{\pi}{2}(90^\circ)\)遅れると言えます。
故に、電流の振幅を大きさで表し(\(|\dot{I}|=I_m\))、交流の位相を偏角で表す(\(\arg \dot{I}=ωt+θ\))複素数\(\dot{I}\)を作ることができれば、コイルの電圧\(\dot{V_L}\)は
\[\dot{V_L}=jωL\dot{I}\]
コンデンサの交流分の電圧\(\dot{V_C}\)は
\[\dot{V_C}=\frac{1}{jωC}\dot{I}\]
と表すことで、それぞれの絶対値として振幅を、それぞれの偏角として位相を扱うことができるようになります。
※コイルの電圧の振幅\(|\dot{V_L}|\)は\(|\dot{I}|\)の\(ωL\)倍、偏角\(\arg\dot{V_L}\)は\(\arg\dot{I}\)に\(\arg j=\displaystyle\frac{\pi}{2}\)だけ加算され、 コンデンサの電圧の振幅\(|\dot{V_C}|\)は\(|\dot{I}|\)の\(\displaystyle\frac{1}{ωC}\)倍、偏角\(\arg\dot{V_C}\)は\(\arg\dot{I}\)に\(\arg j=\displaystyle\frac{\pi}{2}\)だけ減算されている。
複素数を用いることで、振幅と位相を四則演算だけで一度に扱うことができるようになるのです。
\(\dot{I}\)や\(\dot{V_L}\)、\(\dot{V_C}\)のように複素数で表された電流や電圧のことを複素電流や複素電圧と言います。
また詳しいことは次回以降の記事で説明します。
このページで覚えるべきこと
- 複素数\(z=a+bi\)のイメージはこんな感じ。
- \(Z=z_1z_2\)のとき、
\[|Z|=|z_1||z_2|\]
\[\arg Z=\arg z_1+\arg z_2\]
\(Z=\displaystyle\frac{z_1}{z_2}\)(\(z_2\neq0\))のとき、
\[|Z|=\frac{|z_1|}{|z_2|}\]
\[\arg Z=\arg z_1-\arg z_2\] - 電子工作の世界では、複素数は\(|\dot{Z}|\)のように上に点をつけ、電流\(i\)と混同しないように虚数単位には\(j=\sqrt{-1}\)を用いる。今後、特に書いていなければ虚数単位は\(j\)である。
【第3回/全10回】積分
コンデンサの電流と電圧の関係は積分で表されます。
今回は積分について学びましょう。
※すでに知っている人は飛ばしていいです。
積分とは
グラフの傾きをもとに、グラフを描く操作で、積分の反対になります。関数\(f(x)\)の微分は\(\int f(x)dx\)と表します。例えば、\(f(x)=2\)の積分は\(\int f(x)dx=2x+\mathrm{C}\)になります。但し、\(\mathrm{C}\)は任意定数(積分定数と呼ばれる)で、不定積分(後述)の時は必ず付きます。微分したとき0になる定数の代わりだと思えばいいでしょう。

※グラフでは\(\mathrm{C}=0\)としています。
\(f(x)=x\)の積分は\(\int f(x)dx=x^2+\mathrm{C}\)になります。

※グラフでは\(\mathrm{C}=0\)としています。
色々な関数の積分の計算方法
一般に\(n\neq-1\)のとき、\(f(x)=x^n\)の積分は次のようになります。但し、\(\mathrm{C}\)は積分定数です。
\[\int x^ndx=\frac{1}{n+1}x^{n+1}+\mathrm{C}\]
\[\int a dx=ax+\mathrm{C}\]
※\(a\)は定数
また、\(f(x)=\sin x\)や、\(f(x)=\cos x\)の積分は次のようになります。
\[\int \sin xdx=-\cos x+\mathrm{C}\]
\[\int \cos xdx=\sin x+\mathrm{C}\]
また、ネイピア数\(e=2.7...\)を用いた\(f(x)=e^x\)は積分しても同じ形になります。
\[\int e^xdx=e^x+\mathrm{C}\]
※これらの証明は高校でも習いません。覚えるものだと思ってください。
積分の性質
積分には次のような性質があります。但し、\(\int f(x)dx=F(x)\)で、積分定数\(\mathrm{C}\)は\(F(x)\)に含まれています(含まず、最後に足してもいいです)。
\[\int f(kx)dx=\frac{1}{k}F(kx)\left(=\frac{1}{k}F(kx)+\mathrm{C'}\right)\]
\[\int \{f(x)+g(x)\}dx=F(x)+G(x)\left(=F(x)+G(x)+\mathrm{C'}\right)\]
\[\int af(x)dx=aF(x)\left(=aF(x)+\mathrm{C'}\right)\]
下二つの性質は何となくわかるのではないかなと思います。
一番上の性質は例えば\(\int \sin ωxdx=-\displaystyle \frac{1}{ω}cosωx+\mathrm{C}\)のようなことで、傾きの変化が\(ω\)倍速くなった→一瞬当たりのグラフを描く量が\(\displaystyle \frac{1}{ω}\)倍になる→縦に\(\displaystyle \frac{1}{ω}\)倍される、と考えると良いでしょう。
※なお\(\int f(kx)dx=\displaystyle\frac{1}{k}F(kx)+\mathrm{C}\)が成り立つのは\(k\)が\(x\)によらない定数の時です。
定積分
今まで説明してきたのは不定積分といって必ず\(\mathrm{C}\)がつく積分です。
これは\(F(x)=x^2+1\)も\(F(x)=x^2+3\)も、どちらも傾きが\(f(x)=2x\)となるグラフだから、まとめて\(x^2+\mathrm{C}\)と表しているわけです。
それに対して次のように表される定積分は\(\mathrm{C}\)がつきません。なお、\(F(x)\)は\(f(x)\)の不定積分で、積分定数を含んでいます(が、打ち消されます)。
\[\int_a^bf(x)dx]=\left[F(x)\right]_a^b=F(b)-F(a)\]
定積分は例えば\(q(t)=\int_0^ti(t')dt'\)とすれば\(0\)秒から\(t\)秒までにコンデンサに流れ込む(溜まる)電荷を計算することができます(今回の\(t'\)は\(t\)の微分という意味ではなく\(t\)と別の変数\(t'\)ということです。\(i(t')\)を\(t'\)で不定積分した\(I(t')\)に\(t'=t\)と\(t'=0\)を代入して引くということです)。
例題
①\(\displaystyle\int_0^tI_m\sinωt'dt'\)を計算せよ(\(I_m\)、\(ω\)は\(t'\)によらない定数)。
②\(\displaystyle\int_0^tI_m(1-e^{-\frac{1}{RC}t'})dt'\)を計算せよ(\(I_m\)、\(R\)、\(C\)は\(t'\)によらない定数)。
答え
①\(\displaystyle\int_0^tI_m\sinωt'dt'=\left[-\displaystyle\frac{I_m}{ω}\cosωt'\right]_0^t=\displaystyle\frac{I_m}{ω}(1-\cosωt)\)
②\(\displaystyle\int_0^tI_m(1-e^{-\frac{1}{RC}t'})dt'=\left[-I_m(t'+RCe^{\frac{1}{RC}t'})\right]_0^t=I_m(RC-t-RCe^{-\frac{1}{RC}t})\)
※定数\(a\)の積分は\(ax+\mathrm{C}\)となる。
コンデンサの電流と電圧の関係
\(t'=t\)のコンデンサの電圧\(v(t)\)はコンデンサ\(C\)に流れ込む電流\(i(t')\)を用いて次のようになります。なお、\(Q_0\)は(\(t'=0\)にコンデンサに溜まっていた電荷です。
\[v(t)=\frac{1}{C}\{\int_0^ti(t')dt'+Q_0\}\]
\(\{\}\)でくくられた部分が\(t'=t\)までにコンデンサに溜まった電荷で、それを\(C\)で割った形になっています。
例えば、\(i(t')=I_m\cos ωt'\)の電流がコンデンサ\(C\)に流れているとき、コンデンサの両端子間に現れる電圧は\(v(t)=\displaystyle\frac{I_m}{ωC}\sin ωt+Q_0\)になります。
このページで覚えるべきこと
-
\[\int a dx=ax+\mathrm{C}\]
\[\int \sin xdx=-\cos x+\mathrm{C}\]
\[\int \cos xdx=\sin x+\mathrm{C}\]
\[\int e^xdx=e^x+\mathrm{C}\] -
\(\int f(x)dx=F(x)\)、\(\int g(x)dx=G(x)\)のとき、
\[\int f(kx)dx=\frac{1}{k}F(kx)\]
\[\int \{f(x)+g(x)\}dx=F(x)+G(x)\]
\[\int af(x)dx=aF(x)\] -
\[v(t)=\frac{1}{C}\{\int_0^ti(t')dt'+Q_0\}\]